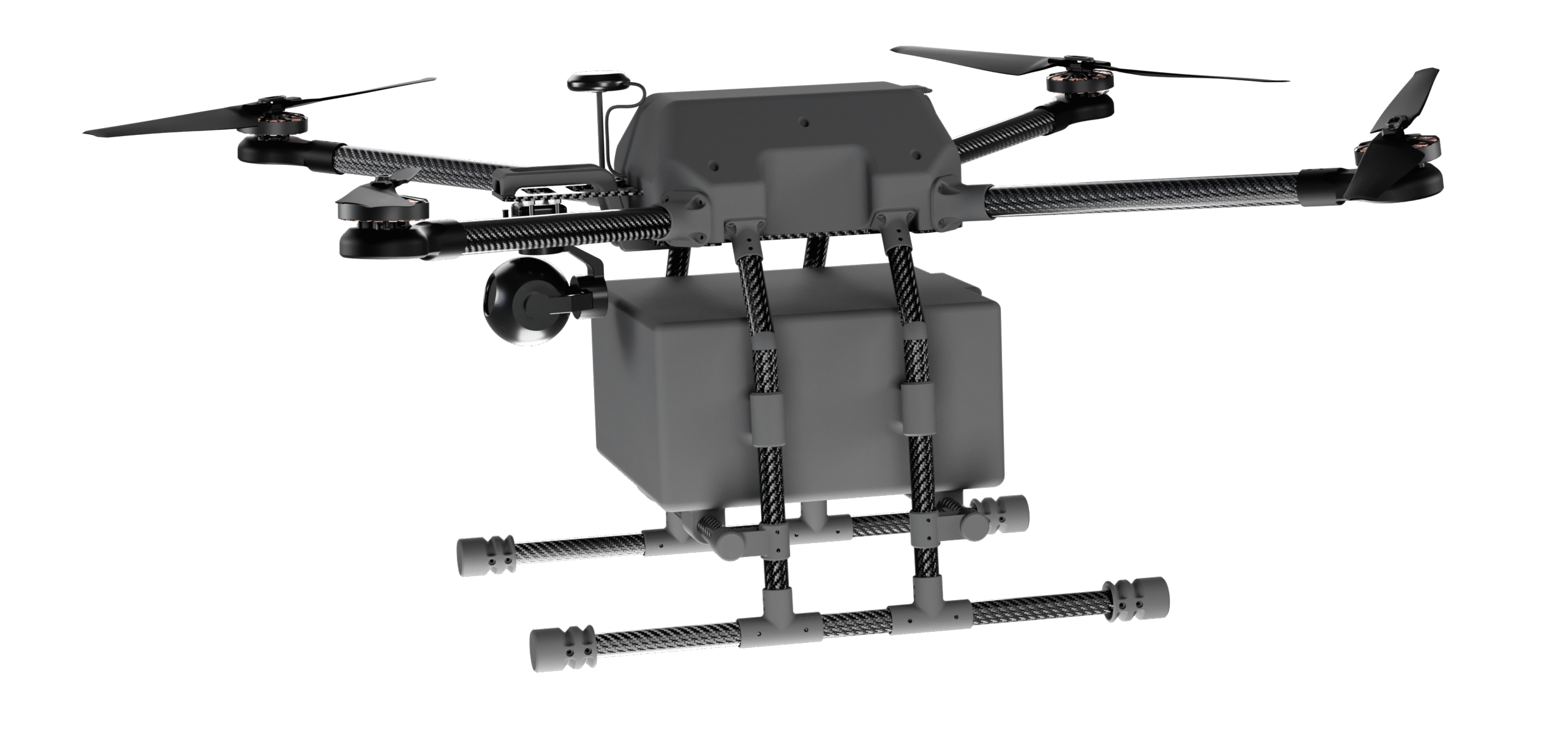



Lectron EBABIL
Modular Autonomous UAV Platform
EBABIL is a modular autonomous UAV platform designed to adapt to different payload capacities and mission requirements through a configurable system architecture.
Product Description
EBABIL is a scalable unmanned aerial platform developed for applications that require flexible payload integration and autonomous operation. Its modular design allows the platform to be configured for different payload classes, enabling users to select the appropriate capacity and performance profile based on operational needs.
The EBABIL family supports multiple payload configurations while maintaining a common flight control and autonomy architecture. This approach simplifies deployment, integration, and maintenance across different application scenarios.
Payload Configuration Options
EBABIL is available in multiple payload classes to support a wide range of operational requirements:
- Light Payload Configuration
- Medium Payload Configuration
- High Payload Configuration
(Payload classes correspond to approximately 2 kg, 5 kg, and 10 kg capacity variants.)
Product Features
Configurable Payload Platform
EBABIL supports multiple payload configurations through a modular structure, allowing the platform to be adapted to different operational and application requirements.
Autonomous Aerial Carrier
Designed as an autonomous aerial carrier, EBABIL enables reliable transport and deployment of mission-specific payloads without continuous operator control.
Scalable UAV Architecture
The scalable system architecture allows EBABIL to support different payload classes while maintaining a common control and autonomy framework across the product family.
Infrastructure-Light Operation
EBABIL is capable of operating in environments with limited reliance on external navigation systems or continuous communication infrastructure.
Rapid Configuration Capability
The platform can be reconfigured quickly between missions, reducing preparation time and enabling efficient adaptation to changing operational needs.
Modular Integration Interfaces
Standardized mechanical, power, and data interfaces enable straightforward integration of sensors, equipment, and custom payload modules.
Technical Features
| Platform Type | Modular autonomous UAV |
| Payload Configuration | Light / Medium / High payload classes |
| Mission Endurance | Payload and mission-profile dependent |
| Cruise Speed | Optimized for stable autonomous operation |
| Operational Altitude | Low-to-medium altitude (AGL) |
| Deployment Concept | Portable and field-deployable system |
| Navigation Mode | Autonomous navigation with onboard sensing |
| Positioning Dependency | Reduced reliance on external navigation infrastructure |
| Mission Configuration | Predefined and repeatable mission profiles |
| Control Architecture | Fully onboard flight control and mission execution |
| System Architecture | Modular and scalable design |
| Payload Interface | Standardized mechanical, power, and data interfaces |
| Compute Capability | Integrated onboard processing |
| Software Compatibility | PX4-compatible autonomy framework |
| Integration Support | Sensor, camera, and custom payload compatibility |
